Интегральная составляющая пид. Законы регулирования: П, ПИ, ПИД. Пример схемы регулирования температуры
Простой дискретный алгоритм ПИД регулятора
Поддерживается всеми микроконтроллерами AVR
ПИД функция использует 534 байта flash памяти и 877 циклов процессора (IAR - low size оптимизация)
1 Введение
Это руководство описывает простую реализацию дискретного пропорционально-интегрально-дифференциального (ПИД) контроллера.
При работе с приложениями, где выходной сигнал системы должен изменяться в соответствии с опорным значением, требуется алгоритм управления. Примерами таких приложений являются блок управления двигателем, блок управления температурой, давлением, расходом жидкости, скорости, силы или других переменных. ПИД-регулятор может быть использован для управления любой измеряемой переменной.
В течение долгого времени в области управления использовались многие решения, но ПИД-регуляторы могут стать "промышленным стандартом" из-за своей простоты и хорошей производительности.
Для получения дополнительной информации о ПИД-регуляторах и их применении читатель должен обратиться к другим источникам, например, PID Controllers by K. J. Astrom & T. Hagglund (1995)
Рисунок 1-1. Типичные отклик ПИД-регулятора на ступенчатое изменение опорного сигнала
2. ПИД регулятор
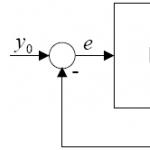
На рисунке 2-1 показана схема системы с ПИД-регулятором. ПИД-регулятор сравнивает измеренное значение процесса Y с заданным опорным значением Y0. Затем разница, или ошибка, E, обрабатывается для расчета нового входного процесса U. Этот новый входной процесс будет пытаться приблизить значение измеряемого процесса к заданному значению.
Альтернативой системе управления с замкнутым контуром, является система управления с открытым контуром. Открытый контур управления (без обратной связи) во многих случаях не является удовлетворительным, и его применение часто невозможно из-за свойств системы.
Рисунок 2-1. Управляющая система с замкнутым контуром на основе ПИД-регулятора

В отличие от простых алгоритмов управления, ПИД-регулятор способен управлять процессом, основываясь на его истории и скорости изменения. Это дает более точный и стабильный метод управления.
Основная идея в том, что контроллер получает информацию о состоянии системы с помощью датчика. Затем вычитает измеренное значение из опорного для вычисления ошибки. Ошибка будет обрабатываться тремя путями: обрабатываться в настоящем времени пропорциональной составляющей, возвращаться в прошлое, используя интегральную составляющую, и предвидеть будущее, через дифференциальную составляющую.
Рисунок 2-2 показывает схемное решение ПИД-регулятора, где Тр, Ti, и Td обозначают постоянные времени пропорциональной, интегральной и дифференциальной составляющих соответственно.
Рисунок 2-2. Схема ПИД-регулятора

2.1 Пропорциональная составляющая
Пропорциональная составляющая (П) дает управляющий сигнал пропорционально вычисленной ошибке. Использование только одного пропорционального управления дает стационарную ошибку всегда, кроме случаев, когда управляющий сигнал равен нулю, а значение системного процесса равно требуемой величине. На рис. 2-3 стационарная ошибка в значении системного процесса появляется после изменения опорного сигнала (ref). Использование слишком большого П-члена даст неустойчивую систему.Рисунок 2-3. Отклик П контроллера на ступенчатое изменение опорного сигнала

2.2 Интегральная составляющая
Интегральная составляющая (И) представляет собой предыдущих ошибок. Суммирование ошибки будет продолжаться до тех пор, пока значение системного процесса не станет равно нужному значению. Обычно интегральную составляющую используют вместе с пропорциональной, в так называемых ПИ-регуляторах. Использование только интегральной составляющей дает медленный отклик и часто колебательную систему. Рисунок 2-4 показывает ступенчатый отклик И и ПИ-регуляторов. Как видите отклик ПИ-регулятора не имеет стационарной ошибки, а отклик И-регулятора очень медленной.
Рисунок 2-4. Отклик И- и ПИ-контроллера на ступенчатое изменение контролируемой величины

2.3 Дифференциальная составляющая
Дифференциальная составляющая (Д) представляет собой скорость изменения ошибки. Добавление этой составляющей улучшает отклик системы на внезапное изменение ее состояния. Дифференциальная составляющая Д обычно используется с П или ПИ алгоритмами, как ПД или ПИД контроллеры. Большая дифференциальная составляющая Д обычно дает неустойчивую систему. Рисунок 2-5 показывает отклики Д и ПД- контроллера. Отклик ПД-контроллера дает быстрый рост значения процесса, чем П контроллер. Обратите внимание, что дифференциальная составляющая Д ведет себя по существу как фильтр верхних частот для сигнала ошибки и, таким образом легко делает систему нестабильной и более чувствительной к шуму.
Рисунок 2-5. Отклик Д- и ПД-контроллера на ступенчатое изменение опорного сигнала

ПИД-регулятор дает лучшую производительность, поскольку использует все составляющие вместе. Рисунок 2-6 сравнивает П, ПИ, и ПИД-регуляторы. ПИ улучшает П, удалив стационарную ошибку, и ПИД улучшает ПИ более быстрым откликом.
Рисунок 2-6. Отклик П-, ПИ- и ПИД-регулятора на ступенчатое изменение опорного сигнала

2.4. Настройка параметров
Наилучший путь найти необходимые параметры ПИД алгоритма - это использование математической модели системы. Однако часто подробного математического описания системы нет и настройки параметров ПИД-регулятора могут быть выполнены только экспериментально. Поиск параметров для ПИД-регулятора может быть сложной задачей. Здесь большое значение имеют данные о свойствах системы и различных условиях ее работы. Некоторые процессы не должны позволить перерегулирования процесса переменной от заданного значения. Другие процессы должны минимизировать потребление энергии. Также важнейшим требованием является стабильность. Процесс не должен колебаться ни при каких условиях. Кроме того, стабилизация должна наступать в течение определенного времени.
Существуют некоторые методы для настройки ПИД-регулятора. Выбор метода будет зависеть в значительной степени от того, может ли быть процесс автономным для настройки или нет. Метод Циглера-Николса это известный не автономная метод настройки. Первым шагом в этом методе является установка И и Д коэффициентов усиления в нуль, увеличивая усиление П до устойчивого и стабильного колебаний (как можно ближе). Тогда критический коэффициент усиления Кс и период колебаний Pc записывается и П, И и Д значения корректируются с использованием Таблицы 2-1.
Таблица 2-1. Расчет параметров по методу Циглера-Николса

Дальнейшая настройка параметров часто необходима для оптимизации производительности ПИД-регулятора. Читатель должен отметить, что есть системы, где ПИД-регулятор не будет работать. Такими могут быть нелинейные системы, но в целом, проблемы часто возникают с ПИД управлением, когда системы неустойчивы и влияние входного сигнала зависит от состояния системы.
2.5. Дискретный ПИД-регулятор
Дискретный ПИД-регулятор будет считывать ошибку, вычислять и выдавать управляющий сигнал за время выборки Т. Время выборки должно быть меньше, чем наименьшая постоянная времени в системе.
2.5.1. Описание алгоритма
В отличие от простых алгоритмов управления, ПИД-регулятор способен манипулировать управляющим сигналом на основе истории и скорости изменения измеряемого сигнала. Это дает более точный и стабильный метод управления.
На рисунке 2-2 показано схемное решение ПИД-регулятора, где Тр, Ti, и Td обозначают постоянные времени пропорциональной, интегральной, и дифференциальной составляющих соответственно.
Передаточная функция системы, изображенной на рисунке 2-2 имеет вид:


Аппроксимируем интегральную и диффиренциальную составляющие, чтобы получить дискретный вид

Чтобы избежать этого изменения в значении опорного процесса делает любое нежелательное быстрое изменение на управляющем входе, контроллер улучшить основе производных срок на значений процесса только:
3. Реализация ПИД-регулятора на Си
К этому документу прилагается рабочее приложение, реализованное на C. Полную описание исходного кода и информации о компиляции можно найти в файле "readme.html".
Рисунок 3-1. Блок-схема демонстрационного приложения

На рисунке 3-1 показана упрощенная схема демо приложения.
ПИД-регулятор использует структуру для хранения своего статуса и параметров. Эта структура инициализируется функцией main, и только указатель на него передается функциям Init_PID() и PID().
Функция PID () должна быть вызвана для каждого интервала времени T, это задается таймером, который устанавливает флаг PID_timer, когда время выборки прошло. Когда PID_timer флаг установлен, основная программа читает эталонное значение процесса и системное значение процесса, вызывается функция PID () и выводится результат на управляющий вход.
Для повышения точности p_factor, i_factor и d_factor увеличиваются в 128 раз. Результат ПИД алгоритма позже уменьшается путем деления на 128. Значение 128 используется для обеспечения оптимизации при компиляции.
![]()
Кроме того, влияние Ifactor и Dfactor будет зависеть от времени T.

3.1. Integral windup
Когда входной процесс, U, достигает достаточно высокого значения, он становится ограниченным. Либо внутренним числовом диапазоном ПИД-регулятора, либо выходным диапазоном контроллера или подавляется в усилителях. Это произойдет, если есть достаточно большая разница между измеряемым значением и опорным значением, как правило, это происходит потому что процесс имеет большие нарушения, чем система способна обрабатывать.
Если контроллер использует интегральную составляющую, эта ситуация может быть проблематичной. В такой ситуации интегральная составляющая будет постоянно суммироваться, но при отсутствии больших нарушений, ПИД-регулятор начнет компенсировать процесс пока интегральная сумма не вернется к норме.
Это проблему можно решить несколькими способами. В данном примере максимальная интегральная сумма ограничена и не может быть больше, чем MAX_I_TERM. Правильный размер MAX_I_TERM будет зависеть от системы.
4. Дальнейшее развитие
ПИД-регулятор, представленый здесь, является упрощенным примером. Контроллер должен работать хорошо, но в некоторых приложениях может быть необходимо, чтобы контроллер был еще более надежным. Может быть необходимо добавление насыщения коррекции в интегральной составляющей, на основе пропорциональной составляющей только на значении процесса.
В расчете Ifactor и Dfactor время выборки T это часть уравнения. Если время выборки Т использоваться намного меньше или больше чем на 1 секунду, точность либо Ifactor или Dfactor будет недостаточной. Можно переписать алгоритм ПИД и масштабирования, чтобы точность интегральной и диффиренциальной составляющих сохранилась.
5. Справочная литература
K. J. Astrom & T. Hagglund, 1995: PID Controllers: Theory, Design, and Tuning.
International Society for Measurement and Con.
6. Файлы
AVR221.rarПеревел Кирилл Владимиров по просьбе
Можно утверждать, что наибольшее быстродействие обеспечивает П-закон , - исходя из соотношения tp / T d .
Однако, если коэффициент усиления П-регулятора Кр мал (чаще всего это наблюдается в с запаздыванием), то такой не обеспечивает высокой точности регулирования, т.к. в этом случае велика величина .
Если Кр > 10, то П-регулятор приемлем, а если Если Кр < 10, то требуется введение в закон управления составляющей.
ПИ-закон регулирования
Наиболее распространенным на практике является ПИ-регулятор, который обладает следующими достоинствами:
- Обеспечивает нулевую регулирования.
- Достаточно прост в настройке, т.к. настраиваются только два параметра, а именно коэффициент усиления Кр и постоянная времени интегрирования Ti. В таком регуляторе имеется возможность оптимизации величины отношения Кр/Ti-min, что обеспечивает управление с минимально возможной среднеквадратичной регулирования.
- Малая чувствительность к шумам в измерения (в отличие от ПИД-регулятора).
ПИД-закон регулирования
Для наиболее ответственных контуров регулирования можно рекомендовать использование , обеспечивающего наиболее высокое быстродействие в системе.
Однако следует учитывать, что это выполняется только при его оптимальных настройках (настраиваются три параметра).
С увеличением запаздывания в системе резко возрастают отрицательные фазовые сдвиги, что снижает эффект действия дифференциальной составляющей регулятора. Поэтому качество ПИД-регулятора для систем с большим запаздыванием становится сравнимо с качеством работы ПИ-регулятора.
Кроме этого, наличие шумов в канале измерения в системе с ПИД-регулятором приводит к значительным случайным колебаниям управляющего сигнала регулятора, что увеличивает дисперсию ошибки регулирования и износ механизма.
Таким образом, ПИД-регулятор следует выбирать для систем регулирования, с относительно малым уровнем шумов и величиной запаздывания в управления. Примерами таких систем является системы регулирования температуры.
Лекция 30. Реализация ПИД-регулятора и цифровой фильтрации в контроллерах
Микропроцессорные контроллеры позволяют реализовать как дискретные, так и аналоговые регуляторы, а также нелинейные и самонастраивающиеся регуляторы. Главная проблема цифрового управления – найти соответствующую структуру регулятора и его параметры. Программная реализация алгоритмов управления по этим параметрам обычно является сравнительно простой задачей.
Каждый регулятор должен включать и средства защиты, предотвращающие опасное развитие процесса под действием регулятора в нештатных ситуациях.
Многие ТП характеризуются несколькими входными и выходными параметрами. Часто внутренние связи и взаимодействие соответствующих сигналов не имеют принципиального значения, и процессом можно управлять с помощью набора простых регуляторов, при этом каждый контур используется в системах прямого цифрового управления.
Линейные регуляторы с одним входом/выходом можно представить в обобщенном виде
где u – это выход регулятора (управляющая переменная), u с – заданное значение, а у – выходной сигнал процесса (управляемая переменная). Параметр п представляет собой порядок регулятора.
Обычный ПИД-регулятор может рассматриваться как частный случай обобщенного дискретного регулятора при п = 2.
Рассмотрим регулятор, состоящий из двух частей: контура обратной связи (feedback) G FB (s ), отрабатывающего ошибку E , и контура упреждения (feedforward) G FF (s ), контролирующего изменения задающего воздействия и прибавляющего к управляющему сигналу поправочный член, с тем чтобы система реагировала более оперативно на изменения задания. Для этого регулятора управляющее воздействие U (s ) представляет собой сумму двух сигналов
Это выражение можно переписать в виде
где U F 1 (s ) – упреждающий сигнал по опорному значению (задающему воздействию), a U F 2 (s ) – сигнал обратной связи.

Рис.30.1. Регулятор, содержащий контур упреждающего управления по опорному значению (заданию) и контур обратной связи по выходу процесс а
Регулятор имеет два входных сигнала U c (s ) и Y (s ) и, следовательно, может быть описан двумя передаточными функциями G F 1 (s ) и G R (s ).
|
|

Поскольку регулятор с ПФ (30.3) имеет за счет G F 1 (s ) больше настраиваемых коэффициентов, чем обычный регулятор, то замкнутая СУ имеет лучшие характеристики.
Положение полюсов системы с обратной связью можно изменить с помощью регулятора G R (s ), а упреждающий регулятор G F 1 (s ) добавляет системе новые нули. Потому СУ может быстро реагировать на изменения сигнала задания, если G F 1 (s ) выбрана правильно.

Рис.30.2. Структура линейного регулятора с упреждающим управлением и обратной связью
Благодаря использованию такого регулятора, возможно создание высокоточных (серво) СУ электроприводами, роботами или станками. Для них важно, чтобы реакция на выходную величину процесса была быстрой и точной при любых изменениях задания.
Если числитель и знаменатель ПФ G R (s ), и G F 1 (s ) в (23.3) выразить полиномами от s , то описание регулятора после преобразований можно представить в следующем виде
г
 де
де
r i , s i , t i – параметры полиномов ПФ, s – оператор Лапласа.
Регулятор, соответствующий уравнению (30.4), можно представить в виде обобщенного регулятора (general controller)
ПФ процесса можно выразить так

Рис.30.3. Структура линейного регулятора с упреждающим управлением и обратной связью в виде ПФ
Если R (s ), S (s ) и T (s ) имеют достаточно высокий порядок, т. е. достаточное количество "ручек настройки", ПФ замкнутой системы можно изменять в широких пределах. Порядок регулятора п должен быть таким же, как и у исходного процесса. Так, подбирая R (s ) и S (s ), можно произвольно менять знаменатель ПФ замкнутой системы. Теоретически это означает, что полюса замкнутой системы можно сдвинуть в любое место комплексной плоскости. (На практике максимальные амплитуда и скорость изменения управляющего сигнала ограничивают свободу перемещения полюсов.)
В результате, неустойчивую систему, имеющую полюс с положительной вещественной частью, можно стабилизировать с помощью СУ.
30.1. Реализация ПИД-регулятора
Прежде всего, следует разработать дискретную модель регулятора и определить соответствующую частоту выборки. Амплитуда выходной величины регулятора должна находиться между минимальным и максимальным допустимыми значениями. Часто нужно ограничить не только выходной сигнал, но и скорость его изменения из-за физических возможностей ИМ и предотвращения их чрезмерного износа.
Изменение настроек параметров и переключение с автоматического режима работы на ручной или другие изменения условий эксплуатации не должны приводить к возмущениям регулируемого процесса.
Регуляторы можно создать по аналоговой технологии на базе операционных усилителей или как цифровые устройства на основе микропроцессоров. При этом они имеют практически одинаковый внешний вид – небольшой прочный корпус, который допускает установку в промышленной среде.
Хотя цифровая технология имеет много преимуществ, аналоговый подход он является основой для цифровых решений. К преимуществам цифровых регуляторов относится возможность с помощью каналов связи соединять их друг с другом, что позволяет производить обмен данными и применять удаленное управление. Нас интересуют программы для цифрового ПИД-регулятора
Дискретная модель ПИД-регулятора . Она необходима для программной реализации аналогового регулятора. Если регулятор проектируется на базе аналогового описания, а затем строится его дискретная модель, при достаточно малых интервалах выборки производные по времени заменяются конечными разностями, а интегрирование – суммированием. Ошибка выходной величины процесса вычисляется для каждой выборки
e (k ) = u c (k ) – y (k ) .
При этом интервал выборки t s считается постоянным, а любые изменения сигнала, которые могли подойти в течение интервала выборки, не учитываются.
Существует два типа алгоритма ПИД-регулятора – позиционный и приращений
Позиционный алгоритм ПИД-регулятора. В позиционном алгоритме (position form ) выходной сигнал представляет собой абсолютное значение управляющей переменной ИМ. Дискретный ПИД-регулятор имеет вид
u (k ) = u 0 + u P (k ) + u I (k ) + u D (k ).
При этом интервал выборки ts считается постоянным, а любые изменения сигнала, которые могли подойти в течение интервала выборки, не учитываются.
Даже при нулевой ошибке управления выходной сигнал отличен от нуля и определяется смещением u 0 .
Пропорциональная часть регулятора имеет вид
u P (k ) = K ∙ e (k ).
Интегральная часть аппроксимируется конечными разностями
u I (k ) = u I (k – 1) + K ∙ (t s / T i ) ∙ e (k ) = u I (k – 1) + K ∙ a ∙ e (k ) .
Величина второго слагаемого при малых t s и больших T i может стать очень маленькой, поэтому нужно обеспечить нужную точность его машинного представления.
Дифференциальная часть ПИД-регулятора аппроксимируется разностью назад
u D (k ) = b ∙ u D (k – 1) – K ∙ (T d / t s ) ∙ (1– b )∙ [y (k ) – y (k – 1)] ,
|
|

Величина T d / N = T f – это нормализованная (в N раз) постоянная времени фильтра в аппроксимации дифференциальной составляющей закона регулирования апериодическим звеном первого порядка. Число N берется в пределах от 5 до 10. Величина b находится в пределах от 0 до 1.
Алгоритм приращений. В нем вычисляется лишь изменение его выходного сигнала. Алгоритм приращений (incremental form ) ПИД-регулятора удобно применять, если ИМ представляет собой разновидность интегратора, например шаговый двигатель. Другой пример такого ИМ – клапан, открытие и закрытие которого управляется импульсами и который сохраняет свое положение при отсутствии входных сигналов.
В алгоритме приращений рассматриваются только изменения управляющего выходного сигнала от момента времени (k – 1) до момента k . Алгоритм регулятора записывается в виде
Δu I (k ) = u (k ) – u (k – 1) = Δ u P (k ) + Δ u I (k ) + Δ u D (k ).
Пропорциональная часть алгоритма приращений вычисляется из уравнения
Δ u P (k ) = u P (k ) – u P (k – 1) = K ∙ [e (k ) – e (k – 1)] = K ∙ Δ e (k ) .
Интегральная часть – из уравнения
Δ u I (k ) = u I (k ) – u I (k – 1) = K ∙ a ∙ e (k ) .
Дифференциальная часть – из уравнения
Δ u D (k ) = b Δ u D (k – 1) – K ∙ (T d / t s )∙(1– b )∙ [Δ y (k ) – Δ y (k – 1) ,
Δ y (k ) = y (k ) – y (k – 1) .
Алгоритм весьма прост. Для его применения, как правило, достаточно операций с плавающей точкой ординарной точности. В нем не возникает проблем из-за насыщения. При переключении с ручного режима на автоматический регулятор, вычисляющий приращения, не требует присвоения начального значения управляющему сигналу (u 0 в позиционном алгоритме).
ИМ можно привести в необходимое положение во время пуска как при ручном, так и при автоматическом управлении. Небольшим недостатком алгоритма приращений является необходимость учитывать интегральную составляющую.
Опорное значение сокращается как в пропорциональной, так и дифференциальной частях, начиная со второй выборки после его изменения. Поэтому, если используется регулятор на базе алгоритма приращений без интегральной составляющей, возможен дрейф управляемого процесса от опорного значения.
Определение частоты выборки в СУ . Это скорее искусство, чем наука. Слишком малая частота выборки снижает эффективность управления, особенно способность СУ компенсировать возмущения. Но если интервал выборки превышает время реакции процесса, возмущение может повлиять на процесс и исчезнуть прежде, чем регулятор начнет корректирующее действие. Поэтому при определении частоты выборки важно учитывать как динамику процесса, так и характеристики возмущения.
С другой стороны, слишком высокая частота выборки ведет к повышенной загрузке ЭВМ и износу ИМ.
Таким образом, определение частоты выборки представляет собой компромисс между требованиями динамики процесса и доступной производительностью ЭВМ и технологических механизмов. Стандартные цифровые регуляторы, работающие с небольшим числом контуров управления (от 8 до 16), используют фиксированную частоту выборки порядка долей секунды.
На частоту выборки влияет и соотношение сигнал/шум. При малых значениях этого соотношения, т. е. при больших шумах, следует избегать высокой частоты выборки, потому что отклонения в измерительном сигнале скорее связаны с высокочастотным шумом, а не с реальными изменениями в физическом процессе.
Считают, что адекватная частота выборки связана с полосой пропускания или временем установления замкнутой СУ. Эмпирические правила рекомендуют, чтобы частота выборки была в б-10 раз выше, чем полоса пропускания, или чтобы время установления соответствовало, по крайней мере, пяти интервалам выборки.
В случае если допустимо дополнительное отставание по фазе на 5-15°, справедливо следующее правило
t s · ω с = 0,15 – 0,5 ,
где ω с – ширина полосы пропускания системы (по уровню 3 дБ), t s – период квантования, или интервал выборки. (Такой подход используется во многих промышленных цифровых одно- и многоконтурных ПИД-регуляторах.)
Ограничение управляющего сигнала . Для ограничения управляющего сигнала существуют две предпосылки:
1) амплитуда выходного сигнала не может превышать диапазон ЦАП на выходе компьютера;
2) рабочий диапазон ИМ тоже всегда ограничен. Клапан не открыть больше, чем на 100 %; на двигатель нельзя подать неограниченный ток и напряжение.
Поэтому алгоритм управления и должен включать какую-либо функцию, ограничивающую выходной сигнал. В некоторых случаях должна быть определена зона нечувствительности, или мертвая зона (deadband).
Если используется регулятор с алгоритмом приращений, то изменения управляющего сигнала могут быть настолько малы, что ИМ не сможет их обработать. Если управляющий сигнал достаточен для того, чтобы воздействовать на ИМ, целесообразно избегать малых, но частых срабатываний, которые могут ускорить его износ.
Простым решением является суммирование малых изменений управляющей переменной и выдача управляющего сигнала ИМ лишь после того, как будет превышено некоторое пороговое значение. Введение зоны нечувствительности имеет смысл, только если она превосходит разрешение ЦАП на выходе компьютера
Предотвращение интегрального насыщения. Эффект интегрального насыщения (integral windup) наблюдается, когда ПИ- или ПИД-регулятор в течение длительного времени должен компенсировать ошибку, лежащую за пределами диапазона управляемой переменной. Поскольку выход регулятора ограничен, ошибку сложно свести к нулю.
Если ошибка управления длительное время сохраняет знак, величина интегральной составляющей ПИД-регулятора становится очень большой. Так происходит, если управляющий сигнал ограничен настолько, что расчетный выход регулятора отличается от реального выхода ИМ.
Так как интегральная часть становится равной нулю лишь некоторое время спустя после того, как значение ошибки изменило знак, интегральное насыщение может привести к большому перерегулированию (over-shoot). Интегральное насыщение является результатом нелинейностей в системе, связанных с ограничением выходного управляющего сигнала, и может никогда не наблюдаться в линейной системе.
Ограничить влияние интегральной части можно условным интегрированием. Пока ошибка достаточно велика, ее интегральная часть не требуется для формирования управляющего сигнала, а для управления достаточно пропорциональной части.
Интегральная часть, используемая для устранения стационарных ошибок, нужна только в тех случаях, когда ошибка относительно невелика. При условном интегрировании эта составляющая учитывается в окончательном сигнале, только если ошибка не превосходит определенного порогового значения. При больших ошибках ПИ-регулятор работает как П-регулятор. Выбор порогового значения для активизации интегрального члена – не простая задача. В аналоговых регуляторах условное интегрирование выполняют с помощью диода Зинера (ограничителя), который подключается параллельно с конденсатором в цепи обратной связи операционного усилителя в интегрирующем блоке регулятора. Такая схема ограничивает вклад интегрального сигнала.
В цифровых ПИД-регуляторах избежать интегрального насыщения проще. Интегральную часть настраивают на каждом интервале выборки так, чтобы выходной сигнал регулятора не превышал определенного предела.
Управляющий сигнал сначала вычисляется с помощью алгоритма ПИ-регулятора, а затем проверяется, превышает ли он установленные пределы:
u = u min , если u d < u min ;
u = u d , если u min ≤ u d < u max ;
u = u max , если u d ≤ u max ;
После ограничения выходного сигнала интегральная часть регулятора сбрасывается. Ниже приведен пример программы ПИ-регулятора с защитой от насыщения.
Пока управляющий сигнал остается в установленных пределах, последний оператор в тексте программы не влияет на интегральную часть регулятора.
(*инициализация*) c1:= K*taus/Ti;
(*регулятор*)
Ipart:= Ipart + c1*e;
ud:= K*e + Ipart; (*вычисление сигнала управления*)
if (ud < umin) then u:= umin (*функция ограничения*)
else if (ud < umax) then u:= ud
Ipart:= u - K*e; (* "антинасыщающая" поправка интегральной части *)
Иллюстрация проблемы интегрального насыщения для привода позиционирования с ПИ-регулятором далее на рис. 30.4.
Плавное переключение режимов работы. При переключении с ручного на автоматический режим выход регулятора может измениться скачком, даже если ошибка управления равна нулю. Причина в том, что интегральный член в алгоритме регулятора не всегда равен нулю. Регулятор – это динамическая система, и интегральная часть является одним из элементов внутреннего состояния, который должен быть известен при изменении режима управления.
Скачок выходной величины регулятора можно предотвратить, а смена режима в этом случае называется плавным (безударным) переходом (bumpless transfer).
Возможны две ситуации: а) переход с ручного на автоматический режим или наоборот; б) изменение параметров регулятора.
Плавный переход в случае а) для аналогового регулятора достигается за счет приведения процесса вручную к состоянию, в котором измеренное значение выходной величины равно опорному.
Процесс поддерживается в этом состоянии до тех пор, пока выходной сигнал регулятора равен нулю. В этом случае интегральная часть также равна нулю, и поскольку ошибка равна нулю, то достигается плавный переход. Эта процедура годна и для цифровых регуляторов.
Другой метод состоит в медленном доведении опорного значения до необходимой конечной величины.
Вначале опорное значение устанавливается равным текущему измерению, а затем постепенно вручную доводится до желаемого.
Если эта процедура выполняется достаточно медленно, интегральная часть сигнала регулятора остается настолько малой, что обеспечивается плавность перехода. Недостатком этого способа является то, что он требует достаточно большого времени, которое зависит от характера процесса.
Ограничение скорости изменения управляющего сигнала . Во многих СУ необходимо ограничивать как амплитуду, так и скорость изменения управляющего сигнала. Для этого используют специальные схемы защиты, подключаемые после канала ручного ввода опорного значения u c (t ) и передающие регулятору отфильтрованный сигнал u L (t ), как это показано на рис. 30.5.
В результате процесс «видит» этот управляющий сигнал вместо введенного вручную. Такой способ обычно применяют при регулировании электроприводов. Ограничение скорости изменения сигнала можно получить с помощью простой цепи обратной связи.
Сигнал ручного управления u c (t ), выступающий в качестве опорного, сравнивается с допустимым управляющим сигналом u L (t ). Сначала их разность ограничивается пределами ue min и u е m ах .
Затем полученное значение интегрируется, причем интеграл аппроксимируется конечной суммой.
Алгоритм ограничения скорости изменения таков:
if (uе < uemin) then uelim:= uemin (*функция ограничения*) else if (ue < uemax) then uelim:= ue
else uelim:= uemax;
uL = uL_old + taus*uelim;
Вычислительные особенности алгоритма ПИД-регулятора. Цифровая реализация ПИД-регулятора из-за последовательного характера вычислений приводит к задержкам, которых нет в аналоговой технологии. Кроме того, некоторые ограничения (защита от насыщения и алгоритмы плавного перехода) требуют, чтобы выход регулятора и срабатывание ИМ происходили одновременно. Поэтому вычислительные задержки необходимо свести к минимуму. Для этого некоторые элементы цифрового регулятора вычисляют до момента выборки.
Для регулятора с защитой от насыщения интегральная часть можно вычислить заранее с помощью разностей вперед
u I (k + 1) = u I (k ) + c 1 · e (k ) + c 2 · [u (k ) – u d (k ) ] ,
где u – ограниченное значение u d ;
T t – коэффициент, который называется постоянной времени слежения.
Дифференциальная часть выглядит как
c 3 = (1– b ) ·K ·T d /t s ;
x (k – 1) = b · u D (k – 1) + c 3 · y (k – 1).
Переменную x можно обновить сразу после момента времени k
x (k ) = b · x (k – 1) + c 3 · (1– b ) · y (k ).
Таким образом, u D (k + 1) удается вычислить из (24.2), как только получен результат измерения y (k + 1).
Оптимизация вычислений необходима, так как цифровой регулятор иногда должен выполнять несколько тысяч управляющих операций в секунду. В этих условиях важно, чтобы некоторые коэффициенты были доступны сразу, а не вычислялись каждый раз заново. Кроме того, промышленные регуляторы имеют не самые быстрые процессоры (i 386, 486). Поэтому порядок и тип вычислений очень влияют на скорость операций управления.
Алгоритм ПИД-регулятора . Пример программы ПИД-регулятора на языке Pascal. Вычисление коэффициентов c 1 , c 2 и c 3 нужно производить лишь в случае изменения параметров регулятора K , T i , T d и T f . Алгоритм регулятора выполняется в момент каждой выборки. Программа имеет защиту от насыщения интегральный составляющей.
(*Предварительное вычисление коэффициентов*)
c1:= K*taus/ Ti; (* уравнение 23.7 *)
с2:= taus/ Tt; (* уравнение 24.1 *)
beta:= Td/ (Td + taus*N); (* уравнение 24.1 *)
сЗ:= K*Td*(l - beta)/ taus; (* уравнение 24.2 *)
с4:= сЗ*(1 - beta); (* локальная константа*)
(* Алгоритм управления *)
Поскольку количество сочетаний трех параметров, предусмотренных для настройки регуляторов, весьма значительно, с течением времени было разработано много методик, облегчающих их правильную настройку. Некоторые из них требуют определенной дестабилизации технологического процесса, что зачастую неприемлемо на практике. Цель данной статьи – предложить ряд простых правил настройки регуляторов, позволяющих выполнять данную работу с минимальными отклонениями от режимных параметров.
Основное правило: регулятор следует настраивать сообразно технологическому процессу. При высоком быстродействии процесса (например, в контуре расхода), регулятор также следует настроить на быстрое срабатывание. Скорость срабатывания регулятора определяется интегральным временем (интегральной составляющей), а не зоной пропорционального регулирования (усилением). Неправильное использование этих параметров значительно снижает эффективность настройки регуляторов. При низком быстродействии процесса (например, при регулировании температуры на тарелке в верхней части ректификационной колонны) регулятор следует настроить на медленное срабатывание СООБРАЗНО ПРОЦЕССУ. Если у Вас отсутствует информация о характеристиках процесса и не к кому обратиться за разъяснениями, Вам следует перепоручить настройку регуляторов специалисту, который сможет получить необходимую информацию.
Общие правила для стандартных контуров управления
Расход
Обычно более половины контуров управления на установке представляют собой контуры регулирования расхода. Установите интегральную составляющую (I) на 0,1 минуты. Отрегулируйте зону пропорционального регулирования так, чтобы предотвратить излишнюю зашумленность результатов измерения (как правило, около 300%, хотя, в некоторых случаях, при неправильном монтаже узла расходомера, требуемое значение может достигать 1000%). Установка зоны пропорционального регулирования для контура, в котором используется позиционер клапана, в два – три раза превышает значение для контура без позиционера. Для медленно срабатывающих или заедающих регулирующих клапанов может потребоваться установка 0,2 или 0,3 минуты, однако, обычно, такие значения являются исключением. Если эти настройки не работают, проверьте монтаж клапана и первичного измерительного элемента с целью определения неисправности. Устраните неисправность. Не следует устанавливать регулятор на неприемлемое значение интегральной составляющей, например, 10 минут. Если вы считаете, что требуемое значение интегральной составляющей равно 10 минут, следует использовать регулятор в ручном режиме или клапан с ручным приводом.
Примечание: Регуляторы не будут нормально работать, если клапан или другой конечный регулирующий элемент почти полностью закрыт или почти полностью открыт. Настраивать регуляторы в этих условиях не следует. Попросите оператора открыть или закрыть байпас (при наличии байпаса) или дождитесь, пока технологические параметры не изменяться настолько, чтобы клапан вернулся в пределы рабочего диапазона. Предельные значения рабочего диапазона составляют от 5 до 95% рабочего хода, при этом более безопасный диапазон – от 10 до 90%. Не следует использовать воздействие дифференциальной составляющей для контуров регулирования расхода.
Уровень
Следующий за контуром расхода наиболее распространенный контур управления – контур уровня. не следует использовать малые значения интегральной составляющей в контуре регулировки уровня. При использовании подобного значения контур будет безостановочно работать в цикличном режиме, нередко с периодом (временем от пика одного цикла до пика следующего цикла) от 10 до 15 минут. Этот период обратно пропорционален интегральному времени. Установите интегральное время на 10 минут. Эта установка будет приемлемой для 80 — 90% регуляторов уровня. Если временная постоянная аппарата (объем/расход) составляет от 1 до 2 минут, то можно использовать более короткое интегральное время, однако следует помнить о том, что более продолжительное время является более надежным. При большом объеме аппарата и малом расходе следует использовать более продолжительное интегральное время.
Если важна точность регулирования уровня, используйте наименьшее значение зоны пропорционального регулирования (10 — 50%), при котором отсутствует циклическое срабатывание. Если плавное изменение расхода на последующую установку важнее жесткого регулирования уровня, используйте более широкую зону пропорционального регулирования (100 — 200%). Не следует использовать воздействие дифференциальной составляющей в контуре регулирования уровня. Впрочем, имеются немногочисленные исключения. В очень редких случаях небольшая дифференциальная составляющая используется для компенсации на регулирующих клапанах уровня со значительным гистерезисом. Шумы по уровню вызывают дрожание клапана, что может способствовать более плавному регулированию. Более оптимальное решение – установить позиционер или, что еще лучше, регулятор расхода в каскаде с регулятором уровня.
В контурах уровня, если регулятор управляет клапаном без позиционера, зачастую наблюдается предельный цикл. График предельного цикла имеет пилообразную форму, иногда с плоскими нижними и/или верхними участками. Контроль выходного сигнала в ходе предельного цикла показывает изменение, равное примерно 5%. Устранить подобный предельный цикл путем настройки практически невозможно. Настройка приводит к изменению периодичности цикла, но не влияет на его амплитуду. Если регулирование клапана осуществляется в пределах рабочего диапазона, то устранить данную проблему можно только путем установки позиционера или каскадированием уровня с расходом.
Если уровень контролируется по расходу продукта, направляемого в парк хранения, то, как правило, циклическое срабатывание не имеет значения. Если же речь идет об орошении в ректификационной колонне, зацикливание, как правило, недопустимо. Следует отметить, что циклическое управление клапаном в почти полностью закрытом или почти полностью открытом положении приводит к возникновению предельного цикла, как правило, с плоским нижним участком, если клапан почти закрыт или с плоским верхним участком, если клапан почти полностью открыт.
Давление жидкости
Настройка осуществляется аналогично контурам расхода. Шумы могут быть не столь интенсивными, как при регулировании расхода, и значения зоны пропорционального регулирования, как правило, будут меньше.
Давление газа
Настройка осуществляется аналогично контурам уровня с использованием высокого значения интегральной составляющей. Регулятор, работающий только в пропорциональном режиме, обеспечивает адекватное регулирование, но с определенным изменением контрольной точки в зависимости от состояния процесса по причине пропорционального отклонения. Так как зона пропорционального регулирования может, как правило, оказаться очень небольшой (менее 100% и, нередко, примерно от 5 до 20%), то такое отклонение будет незначительным.
Отрегулировав более 80% контуров стандартной установки, переходим к более труднорегулируемым контурам, а именно: температуре, давлению паров и составу. Сюда же относится температура, на основании которой определяется состав среды во многих колоннах дистилляции.
Труднорегулируемые контуры
Существует две способа настройки труднорегулируемых контуров. Первый способ заключается в использовании безопасных исходных настроек: зона пропорционального регулирования 100%, интегральное время 5 — 10 минут, без дифференциальной составляющей. Переключите регулятор в автоматический режим при результатах измерения, близких к требуемой уставке.
При возникновении циклических колебаний определите время от одного пика до другого (от верхней точки до верхней точки или от нижней точки до нижней точки). Это – период контура управления. Если отклонение каждого пика от уставки будет больше отклонения предыдущего пика, увеличьте зону пропорционального регулирования (в два, три и более раз) до тех пор, пока увеличение амплитуды в цикле не прекратиться.
Если исходное интегральное время составляет менее половины периода, оно слишком короткое, что, возможно, и вызывает циклическое срабатывание. Увеличьте интегральное время. По мере увеличения интегрального времени период должен сокращаться. Если период примерно в два раза превышает интегральное время и происходит затухание колебаний, это означает, что работа почти полностью закончена. При отсутствии помех измерения следует установить дифференциальную составляющую, равную четверти интегрального времени. Дождитесь изменения параметров или попросите оператора немного скорректировать уставку в безопасном направлении. Выполните повторную настройку зоны пропорционального регулирования, чтобы обеспечить приемлемое гашение колебаний после выхода из режима. Повторяйте эти действия, пока не получите нормальный отклик контура.
Проконтролируйте контур в течение нескольких часов, чтобы убедиться в стабильности его работы. Некоторые контуры стабильны при небольших изменениях параметров, но начинают осциллировать при значительных изменениях. Увеличьте зону пропорционального регулирования, если это необходимо, чтобы обеспечить стабильность контура при значительных отклонениях от заданного режима.
Если этот ускоренный метод оказался в вашем случае неэффективным или если вы хотите действовать более методично, следуйте приведенной ниже методике. Она работает во всех случаях и не оставляет сомнений относительно характеристик контура управления.
Стандартный метод настройки регуляторов
1. Переключите регулятор в ручной режим работы, когда процесс достаточно стабилен и на установке не ожидается резких отклонений от заданного режима. Установите D (производную отклонения или дифференциальную составляющую у некоторых регуляторов) на минимальное, а I (интегральное время или интегральное составляющую у некоторых регуляторов) на максимальное значение.
2. Для начала выберите уставку, равную результатам измерения и установите зону пропорционального регулирования (P) на 100% (или коэффициент усиления на 1,0 у некоторых регуляторов). Немного измените выходной сигнал и переключите регулятор в автоматический режим. Зарегистрируйте исходное положение клапана на тот случай, если вам потребуется вернуться к нему в процессе настройки.
3. При отсутствии колебаний повторите п. 2, уменьшая зону пропорционального регулирования (возможно, до половины первоначального значения). Продолжайте уменьшать зону пропорционального регулирования, пока не начнутся колебания. Если с первой попытки возникнут колебаний с возрастающей амплитудой, верните регулятор в ручной режим и установите клапан в исходное положение, зарегистрированное в п. 2. Удваивайте зону пропорционального регулирования и повторяйте попытки, пока не получите равномерные или почти равномерные колебания. Замерьте период (определяемый как время отработки одного полного цикла)
4. Для ПИ-регулятора:
Установите I = период х 0,82.
Период увеличится приблизительно на 43%. Каждый пик должен составлять примерно половину от амплитуды предыдущего пика. Это называется гашением амплитуды на четверть.
5. Для ПИД-регулятора:
Установите I = период х 0,5.
Установите D = период х 0,125.
Удвойте зону пропорционального регулирования.
Период уменьшится примерно на 15%.
Выполните повторную настройку зоны пропорционального регулирования, если необходимо большее или меньшее демпфирование.
6. Следует помнить о том, что безопасными являются большие значения I и малые значения D. Данные указания предназначены для регуляторов, настраиваемых в минутах на повтор. Некоторые изготовители используют обратное отношение I и D, при этом наибольшее значение соответствует наименьшему и наоборот.
7. При зашумленных результатах измерения (в особенности это относится к контурам Ph) использование дифференциальной составляющей, как правило, невозможно. Ни в коем случае не устанавливайте дифференциальную составляющую, которая превышает интегральную.
Каскадирование и другие виды взаимодействия контуров управления
Сначала выполните настройку вторичного контура (т.е. расхода) в режиме локальной уставки. Уменьшите интегральную составляющую до минимально допустимого значения. Переключите вторичный контур в режим работы с удаленной уставкой и выполните настройку первичного контура (т.е. уровня). Значение интегральной составляющей первичного регулятора не должно быть меньше помноженного на 4 значения интегральной составляющей вторичного регулятора. Эти же правила применимы и для контуров, взаимодействующих через технологический процесс.
Примером такого взаимодействия через технологический процесс является контур давления в колонне и температурный контур с компенсацией по давлению, используемые для управления ректификационной колонной. Настройте контур давления (который является самым быстрым контуром в данном примере) на минимальную интегральную составляющую, а затем установите интегральное время регулятора температуры, не менее, чем в 4 раза превышающее интегральное время контура давления. Для проверки взаимодействия этих двух контуров при их циклическом срабатывании с аналогичным периодом, переведите один из контуров в ручной режим. Прекращение цикла указывает на возможное наличие проблемы, вызванной взаимодействием. Переместите контуры или используйте описанную выше методику минимизации колебаний.
С дополнительными материалами по настройке ПИД регуляторов Вы можете ознакомиться .
Узнать больше про регуляторы и алгоритмы работы регуляторов Вы можете .
Для закрепления полученных знаний предлагаем Вам воспользоваться программой имитации контуров регулирования
Всем привет. Рассмотрев в прошлой статье основу технологии построения веб-интерфейса, мы возьмем небольшую паузу с проектированием, и рассмотрим пару статей по ПИД–регулятору. Куда войдут основы автоматики, и на примере фрезерного станка на микроконтроллере, познакомимся с основными законами управления. А также рассчитаем основные коэффициенты законов для матмодели. В конце статьи выложен проект в Proteus на ATmega8
.
1. Выходная величина y.
2. Входной задающий параметр u.
3. Входное возмущающее воздействие f.
На рисунке слева представлен общий вид ОУ с его параметрами. Справа наш пример представленный в протеусе в виде двигателя с энкодером, где входным задающим параметром является постоянное напряжение и в зависимости от его величины изменяется частота вращения двигателя. Выходным параметром является показания энкодера, а именно угол поворота (число импульсов за один оборот). Третий параметр — возмущающее воздействие — это воздействие со стороны внешней среды, которое нарушает правильное функционирование объекта, т.е. трение, нагрузка и т.д.

Для исключения последнего используется второй параметр, т.е. задающий. Техническое устройство, осуществляющее автоматическое управление называется управляющим устройством (УУ). А ОУ совместно с управляющим и задающим устройствами называют систему автоматического управления (САУ). Ниже структурная схема системы.
 Здесь хочется сразу добавить, что ОУ может управляться по трем основным принципам
:
Здесь хочется сразу добавить, что ОУ может управляться по трем основным принципам
:
1. Принцип разомкнутого управления
– вырабатывается на основе заданного алгоритма и не контролируется другими факторами.
2. Принцип компенсации возмущений
, где результат возмущения в виде корректива вносится в алгоритм управления.
3. Принцип управления по ошибке
. Здесь коррективы вносятся в алгоритм управления по фактическому значению выходной величины.
Наш проект будет строится по последнему принципу управления – по ошибке. Ниже, слева структурная схема, а справа проект, где осуществляется управление по ошибке.


ЗУ — это у нас двигатель с энкодером (с левой стороны), с которого импульсы поступают в микроконтроллер. Где в свою очередь прописана матмодель ПИД-регулятора. Контроллер выступает в роли УУ. Далее ШИМ генерирует необходимый импульс и посылает его на вход второго двигателя с энкодером, который правее. (Мы с Вами уже рассматривали ) . Выход импульсов с которого, является выходной величиной и ошибкой в обратной связи y ос. Кнопки — это возмущающее воздействие, которыми мы произвольно добавляем импульсы ОУ. Где в свою очередь УУ должно быстро и плавно подрегулировать под угол поворота задающего устройства.
Далее САУ классифицируются по:
1.
Алгоритму функционирования:
— системы стабилизации
— поддержание регулируемого параметра на заданном уровне;
— программное управление
– алгоритм задан в функции времени, где выходная величина изменяется во времени по заданному закону;
— следящие системы
— алгоритм функционирования заранее не известен, где регулируемая величина должна воспроизводить изменение некоторой внешней величины;
— экстремальные системы
— показатель качества или эффективности процесса может быть выражен в виде функции параметров системы, а сама функция имеет экстремум (максимум или минимум).
— системы оптимального управления
— процесс управления ведется таким образом, что некоторая характеристика процесса была бы оптимальной;
— адаптивные системы
– некоторые параметры ОУ и др. элементов системы могут изменяться.
Наш алгоритм это программное управление, где выходная величина будет результатом ПИД управления.
2. По виду дифференциальных уравнений
, описываемых систему – линейные (статические характеристики всех элементов являются прямолинейными) и нелинейные (статическая характеристика является нелинейной).
3. По характеру сигналов в основных элементах
- непрерывные и дискретные(в последних непрерывный входной сигнал преобразуется на выходе в последовательность импульсов).
Наш проект нелинейный и сигналы дискретные. И последнее, рассмотрим типовые законы управления, определяющие алгоритм управления в функции от ошибки управления. Под законом регулирования понимают алгоритм, в соответствии с которым управляющее устройство формирует воздействие, подаваемое на вход ОУ. Законы управления описываются передаточными функциями, которые являются одним из способов математического описания динамической системы. Вид передаточной функции управляющего устройства определяет закон управления. Различают пять основных законов управления: пропорциональный (П), интегральный (И), пропорционально –интегральный (ПИ), пропорционально-дифференциальный (ПД), пропорционально — интегрально – дифференциальный (ПИД).
Рассмотрим каждый закон в отдельности на примере устройства синхронизации. Итак, исходные данные:
Соберем пример в Proteus. Возьмем два движка с инкрементальными энкодерами, микроконтроллер, два счетчика импульсов, а также подключим осциллограф и ЖК индикатор для отображения рассогласования (ошибки). Рассмотрение датчиков угла поворота (энкодера) выходит за пределы статьи, единственное, что нам надо знать, они предназначены для преобразования угла поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить угол его поворота. Выше был представлен рисунок нашего проекта в Proteus. Ниже на рисунке пример настройки мотора с энкодером:
Где в свойствах мотора выставим:
— минимальную массу ротора EffectiveMass= 0,01;
— нагрузка ротора Load/MaxTorque % = 1, чтобы он по инерции не крутился;
— обороты ZeroLoad RPM=20;
— количество импульсов на оборот PulsesperRevolution=24.
Как видите в протеусе отдельного энкодера нет, только с двигателем. Кратко о его подключении. Один конец двигателя на землю, на второй напряжение от -12 или +12 В. И три вывода энкодера. Мы используем один как на рисунке выше. Приведенные параметры являются настроечными параметрами от которых будет зависеть динамика привода, т.е. его поведение.
П — регулятор. Одно из простых устройств и алгоритмов управления, в обратной связи, которое формирует управляющий сигнал. Выдает выходной сигнал u (t) , пропорциональный входному (ошибке регулирования) e (t) , с коэффициентом пропорциональности К , который вырабатывается пропорциональной частью П-регулятора в противодейтвие отклонению реглируемой величины от данного значения, в данный момент времени.
u (t)=K р *e (t) , где K р - коэффициент усиления регулятора.
Чем больше отклонение, тем больше выход именно по данному значению. Т.е. статическая ошибка равна отклонению регулируемой величины. Здесь присутствует вероятность, что система никогда не стабилизируется на заданном значении. Увеличение коэффициента усиления увеличивает разницу между входом и выходом, при этом уменьшается статическая ошибка. Но рост этого коэффициента может привести к автоколебаниям в системе, а дальнейшее его увеличение приведет к потере устойчивости.
Обычно на практике усилительные свойства П-регулятора характеризуют следующими величинами:
— предел пропорциональности d=1/K р
- величина, обратная K р
— предел пропорциональности, выраженный в процентах D=d*100%=100%/K р
.
Показывает, на сколько процентов от своего максимального значения должен изменится входной сигнал, чтобы выходной изменился на 100%.
Автоколеба́ния
- это незатухающие колебания в диссипативной (устойчивое состояние, возникающее в неравновесной среде при условии диссипации (рассеивания) энергии, которая поступает извне) динамической системе с нелинейной обратной связью, поддерживающиеся за счёт энергии постоянного, т. е. непериодического внешнего воздействия.
На рисунке ниже слева нормальный процесс П-регулирования, где видно, что линейность графика прямо пропорционально уменьшению ошибки. Справа, процесс автоколебаний в системе при большом коэффициенте.


П-регулятор находит свое применение в тех же процессах, где не требуется точного поддержания заданного значения, описанных ранее, то есть в контролируемом процессе будет присутствовать статическая ошибка. Возникает данная ошибка из-за того, что выходной сигнал слишком мал для оказания существенного воздействия на поддержание системы на заданном уровне. Вполне допускается, что регулятор выведет требуемое значение, но при возникновении возмущающих воздействий, регулятор не сможет вернуть заданное значение, пока рассогласование не станет достаточно велико, чтобы выходной сигнал смог оказать достаточное воздействие. Для нашего примера такой закон не подходит. Идем далее.
Что значит интегральное управление? А то, что устройство вырабатывает сигнал (u (t)) , пропорциональный интегралу от ошибки регулирования (e (t)) . Система при таком законе астатическая, т.е.возмущение происходит на том участке системы, который находится за интегрирующим звеном. Но при этом динамические свойства системы с И-законом обычно хуже чем у системы П-управления. Ниже представлен закон И-регулятора.
 где K0
- коэффициент усиления регулятора. Скорость изменения выхода И-регулятора пропорциональна ошибке регулирования. Обычно на практике усилительные свойства И-регулятора характеризуют временем изодрома.
где K0
- коэффициент усиления регулятора. Скорость изменения выхода И-регулятора пропорциональна ошибке регулирования. Обычно на практике усилительные свойства И-регулятора характеризуют временем изодрома.
Время изодрома Т и =1/K 0 - величина, обратная K 0 . Также показывает за какое время выход регулятора изменится на 100% (регулирующий орган переместится из одного крайнего положения в другое) при скачкообразном изменении входного сигнала на 100%. Таким образом Т и характеризует быстродействие регулятора. С уменьшением T растет колебательность переходного процесса. При слишком малых значениях T система регулирования может перейти в неустойчивое состояние. Ниже на рисунке слева устойчивое состояние, справа — неустойчивое состояние.


В системе регулирования с И-регулятором обычно отсутствует статическая ошибка регулирования. Как правило И-регулятор не используется самостоятельно, а в составе ПИ- или ПИД- регуляторов.
 Изодромное управление. Управляющее устройство вырабатывает суму двух сигналов — пропорционального ошибке и пропорционального интегралу от ошибки. Выходной сигнал ПИ-регулятора (u (t))
зависит и от ошибки регулирования (e (t))
, и от интеграла от этой ошибки.
Изодромное управление. Управляющее устройство вырабатывает суму двух сигналов — пропорционального ошибке и пропорционального интегралу от ошибки. Выходной сигнал ПИ-регулятора (u (t))
зависит и от ошибки регулирования (e (t))
, и от интеграла от этой ошибки.

K 1
- коэффициент усиления пропорциональной части,
K 0
- коэффициент усиления интегральной части
Так как ПИ-регулятор можно рассматривать как два регулятора, соединенные параллельно, то усилительные свойства ПИ-регулятора характеризуют два параметра:
1) предел пропорциональности d=1/K 1
- величина, обратная K 1
2) время изодрома Т и =1/K 0
— величина, обратная K
0
.
Динамические свойства системы с ПИ-регулятором лучше, чем с И-законом. Изодромная система в переходном режиме приближается к системе с пропорциональным управлением. А в установившемся режиме подобна системе с интегральным управлением. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленнее накапливается интегральная составляющая. ПИ регулирование обеспечивает нулевую ошибку регулирования и нечувствительно к помехам измерительного канала. Ошибка регулирования (статическая) исключается за счет интегрального звена, которое образуется путем постоянного суммирования ε за определенный промежуток времени и формирования сигнала управления, пропорционального полученной величине.
Недостатком ПИ регулирования является медленная реакция на возмущающие воздействия. Для настройки ПИ регулятора следует сначала установить постоянную времени интегрирования равный нулю, а коэффициент пропорциональности — максимальным. Затем как при настройке пропорционального регулятора, уменьшением коэффициента пропорциональности нужно добиться появления в системе незатухающих колебаний. Близкое к оптимальному значение коэффициента пропорциональности будет в два раза больше того, при котором возникли колебания, а близкое к оптимальному значение постоянной времени интегрирования — на 20% меньше периода колебаний. Оптимальным является переходной процесс с 20% перерегулированием.
ПД-регулятор. Если нагрузка объекта изменяется часто и резко, и при этом объект имеет существенное запаздывание, то ПИ-регулятор дает неудовлетворительное качество регулирования. Тогда целесообразно в закон регулирования вводить дифференцирующую составляющую, т.е. воздействовать на регулирующий орган дополнительно по величине первой производной от изменения регулируемого параметра. Cигнал ПД-регулятора (u (t)) зависит от ошибки регулирования (e (t)) и от производной от этой ошибки (от скорости изменения ошибки).
![]()
ПД-регулятор характеризуют два параметра:
1. Предел пропорциональности d=1/K1
— величина обратная К1
.
2. Постоянная времени дифференцирования (время предварения) Тд=K2
. Это интервал времени между моментами достижения регулирующим органом одинакового положения при наличии дифференциальной составляющей и без нее. Параметр настройки дифференциальной составляющей. За счет дифференциальной составляющей упреждается перемещение регулирующего органа.
Дифференцирующее звено вычисляет скорость изменения ошибки, т.е. прогнозирует направление и величину изменения ошибки. Если она положительна, то ошибка растет и дифференцирующая часть вместе с пропорциональной увеличивает воздействие регулятора на объект. Если отрицательна — уменьшается воздействие на объект. Эта система регулирования имеет статическую ошибку регулирования, но быстродействие у нее выше, чем П- , И- , Пи-регуляторы. В начале переходного процесса ПД-регулятор имеет высокое усиление и, следовательно, точность, а в установившемся режиме он вырождается в П-регулятор со свойственной ему статической ошибкой. Если статическую ошибку скомпенсировать, как это делается в П-регуляторах, то возрастет ошибка в начале переходного процесса. Таким образом, ПД-регулятор по своим потребительским свойствам оказывается хуже П-регулятора, поэтому на практике он используется крайне редко. П-звено имеет положительное свойство — вносит в контур регулирования положительный фазовый сдвиг, что повышает запас устойчивости системы при малом времени предварения. Однако с увеличением этого времени растет усиление регулятора на высоких частотах, что приводит к режиму автоколебаний. Чем больше время дифференцирования, тем больше скачок в перемещении регулирующего органа.
Это сумма трех регуляторов П, И и Д (Пропорционально-интегрально-дифференцирующий). Выходной сигнал ПИД-регулятора (u (t)) зависит от ошибки регулирования (e (t)) , от интеграла от этой ошибки и от производной от этой ошибки.
 Усилительные свойства характеризуют три параметра:
Усилительные свойства характеризуют три параметра:
 1. Предел пропорциональности d=1/K1
.
1. Предел пропорциональности d=1/K1
.
2. Время изодрома Ти=1/K0
.
3. Время предварения Тд=K2
.
Системы регулирования с ПИД-регуляторами сочетают в себе достоинства П- , И- , и ПД- регуляторов. В таких системах отсутствует статическая ошибка и они обладают высоким быстродействием.
Ниже выложен проект в Proteus на ATmega8. Где представлена выше описанная модель ПИД — регулятора.
(Скачали: 428 чел.)
В следующей статье рассмотрим расчет основных коэффициентов законов регулирования для нашего проекта, а именно синхронизации двигателей станка. Написание матмодели для микроконтроллера и существующие варианты. А также этапы проектирования: от замысла до платы. На этом мы сегодня и остановимся. Всем пока.